◆7年かけてもとん挫したロボットアームの代わりに

遠隔操作で伸びていく釣りざお状の装置=神戸市の三菱重工業神戸造船所本工場(代表撮影)で
装置は、製造する三菱重工業神戸造船所(神戸市)で公開された。伸縮する釣りざお状(幅約40センチ、重さ約7トン)で、長さ約24メートルまで伸ばすことができる。デブリを先端にくっつけたり、つかんだりして耳かき1杯分の微量を採取する。この日は、格納容器を再現した設備で作業を公開。装置は、横穴から狭いルートをゆっくりと進み、底部にあるデブリに見立てた小石をつかみ取った。
格納容器内に見立てた空間で、デブリを模した小石を目がけて下りていく装置=神戸市の三菱重工業神戸造船所本工場(代表撮影)で
2号機のデブリ採取を巡っては、東京電力は今年1月、使用を予定するロボットアームの性能が不足しているなどとして着手の延期を発表。計画を変更し、調整の間は釣りざお状の装置を使うことになった。 東京電力の担当者は「デブリ取り出しは、廃炉を進める上で重要な位置付けとなる。安全、確実に進めたい」と話した。 福島第1原発では、人が近づけない高線量の原子炉内を調べるため、遠隔操作のロボットが投入されてきた。これまでに、炉内を撮影し情報を得られた一方、立ち往生しうまくいかなかったケースも。2号機でデブリを採取するため、28日に公開された釣りざお式の装置とは別に使用を計画するロボットアームは7年たっても未完成。廃炉作業の困難さを象徴する。◆2017年から開発スタートも延期、また延期…
「デブリを取るだけでなく格納容器の内部を広範囲に調査できるロボットアームは有効な装置。内部に進入した時に不具合を起こして引き返せないということにならないよう、動作の精度を高め、自信を持って使えるようにしたい」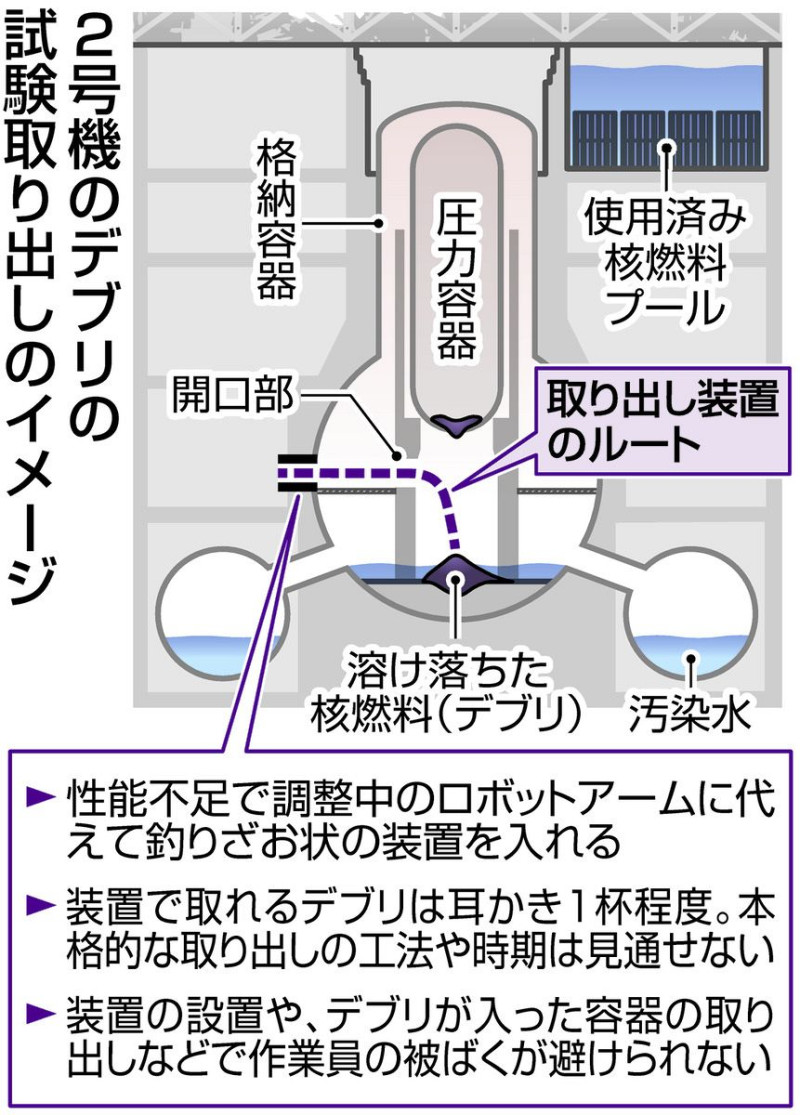 東京電力の担当者はこの日、調整に時間がかかっているロボットアームを使う意義をそう説明した。 真っすぐな釣りざお式装置とは異なりロボットアームは多関節の構造で、全長約22メートル、重さ約4.6トン。格納容器の横穴からアームを入れて先端でデブリを採取する計画で、2017年に開発がスタートした。だが、数センチ単位の細かな動きができず、開発に手間取っている。 製造元は英国の企業で、新型コロナウイルスの影響で国内への搬入も遅れた。こうした事情が計画を狂わせ、2号機の耳かき1杯程度のデブリを採取するのにも、当初の21年内から3回延期され、3年近く先延ばしとなっている。
東京電力の担当者はこの日、調整に時間がかかっているロボットアームを使う意義をそう説明した。 真っすぐな釣りざお式装置とは異なりロボットアームは多関節の構造で、全長約22メートル、重さ約4.6トン。格納容器の横穴からアームを入れて先端でデブリを採取する計画で、2017年に開発がスタートした。だが、数センチ単位の細かな動きができず、開発に手間取っている。 製造元は英国の企業で、新型コロナウイルスの影響で国内への搬入も遅れた。こうした事情が計画を狂わせ、2号機の耳かき1杯程度のデブリを採取するのにも、当初の21年内から3回延期され、3年近く先延ばしとなっている。 ◆様々なロボット開発に3年で国費から78億円
これまでにロボットによりデブリのようなものを撮影できたり、格納容器の損傷具合を確認できたりと、成果はあった。だが、ロボットを投入できても炉内の様子が分からず立ち往生することもあり、目的を達成するのに困難が伴う。 2号機の17年の炉内調査には、外見から「サソリ」と呼ばれたロボットを投入。堆積物に乗り上げて調査地点にたどり着けず、戻ってくることもできなかった。1号機でも15年の調査で走行不能となったロボットが残ったままで、今年2月に小型ドローンを圧力容器直下に飛ばしたところ、カメラがその姿を捉えた。 前例のないデブリの採取や炉内を調査するために多額の国費が投入され、17〜19年度で78億円に上る。開発中のロボットアームの一部費用もここから捻出されている。
前例のないデブリの採取や炉内を調査するために多額の国費が投入され、17〜19年度で78億円に上る。開発中のロボットアームの一部費用もここから捻出されている。 ◆ロボット開発費用、国民にツケが回る可能性も?
このロボットアームが完成しても、耳かき1杯程度のデブリ取り出しに使うだけ。段階的に採取量を増やす際には別の装置が必要だ。その後に計画されている本格的な取り出しは工法さえ決まっていない。 ロボットの開発には国費以外に、東電が最終的に負担する予定の「廃炉費用」の約8兆円の中でも賄われる。今回、公開された釣りざお式の装置も廃炉費用から出される。8兆円のうち東電が負担できているのは1兆8000億円。仮に東電の支払いが滞れば、国民にツケが回る可能性がある。 鄭重声明:本文の著作権は原作者に帰属します。記事の転載は情報の伝達のみを目的としており、投資の助言を構成するものではありません。もし侵害行為があれば、すぐにご連絡ください。修正または削除いたします。ありがとうございます。



